精准触觉传感已经成为机器人、可穿戴设备和人机交互发展的研究热点。传统触觉传感系统复杂、响应迟缓,智能、高效、可存储成为其应用的瓶颈。近日,我院郑高峰教授团队在精密柔性触觉传感器领域取得突破。借鉴几何分形原理,提出了一种基于希尔伯特曲线的触觉传感器自适应设计范式,位置节点的数量可以根据不同场景进行调整从而实现根据需求逆向设计,同步实现了触感信息的存储。既满足了非定型曲面精确触觉传感的发展需求,也突破了复杂信号解耦和数据冗余等技术难题。
国际顶尖期刊Advanced Functional Materials于2025年11月10日报道了这一最新研究成果“Inverse-design Tactile Sensor with Self-information Storage via Fractal Encoding of Hilbert curve”。我院郑高峰教授、厦门大学电子学院陈忠教授、美国加州大学伯克利分校林立伟教授为论文共同通讯作者,博士研究生陈梓涵为论文第一作者,研究工作得到了我院陈延平老师和颜黄苹老师的帮助与指导。硕士研究生邓长卓,本科生付一鸣、赵畅旭参与了本论文的研究工作,也得到国网福建省电力有限公司宁德供电公司刘子霖的协助。
1、背景介绍
触觉感知是人类皮肤解析物体触感的核心能力,通过评估物体特性并触发即时反应实现交互。具体而言,压力、力及振动等外部刺激可激活触觉感受器,转化为神经冲动并由大脑处理,最终形成反馈控制响应。在机器人皮肤、闭环人机交互和虚拟现实等前沿领域,现代系统已广泛模拟触觉感知功能。然而,当前触觉传感器设计范式在实现高分辨率与高精度感知时仍面临挑战,主要表现为信号解耦的复杂性与数据冗余问题。
2.研究内容
2.1 逆设计触觉传感器的设计方法
利用希尔伯特曲线的连续性和自相似性特性,一条线遍历并填充整个表面以生成具有哈希映射表的节点。将传感器的导电路径设计成充满整个平面的连续分形的希尔伯特曲线,从而巧妙地把复杂平面触觉感知问题简化为对曲线的电阻变化监测,从硬件本源上实现了信号降维,极大简化了系统结构。
这条曲线上的每一个拐点都是一个独特的“感知位点”。当触摸发生时,压力会改变曲线上特定点的电阻。由于整条曲线的结构是预先精确设计的,就像一个内置的物理地图,系统无需复杂计算,通过检测电阻变化就能瞬时定位触摸点的位置,提高了触觉传感的响应速度。
每个感知位点因其在分形曲线上的独特位置,都对应一个唯一的“身份编码”。这意味着,触觉信息被直接编码在传感器的物理结构中。传感器本身不再只是一个收集数据的“哨兵”,而是一个自带“花名册”的“识别官”,实现了触觉信息的自存储与自识别。
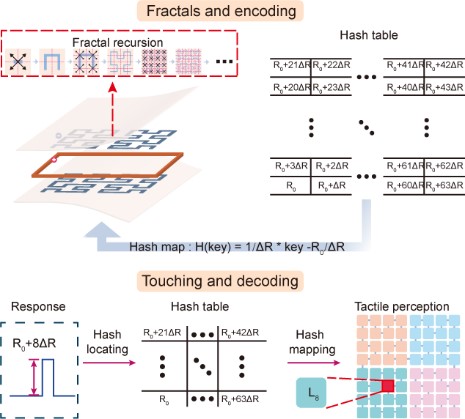
图1 基于希尔伯特曲线自适应模式的逆设计触觉传感器设计方法
2.2 逆设计触觉传感器的数学原理与实现
通过独特的单维和两层分离结构实现按需和数据精确的触觉感知。首先,利用希尔伯特曲线的连续性和自相似性特性,一条线遍历并填充整个平面以生成具有哈希映射表的节点。随着矢量距离的增加,位置节点可以编码以与哈希表中的条目相对应,其中每个位置节点与哈希表中的一个条目匹配。通过这种方式,哈希表被有效地存储在传感器中,以便其自身进行快速的触觉信息识别。分形和希尔伯特曲线的递归特性意味着传感器的感知精度从低到高不等,并且位置节点的数量可以根据不同场景进行调整从而实现根据需求逆向设计。该传感器的设计范式最大限度地减少了传感器与计算单元之间的接口,以提高数据压缩率并降低计算复杂度。
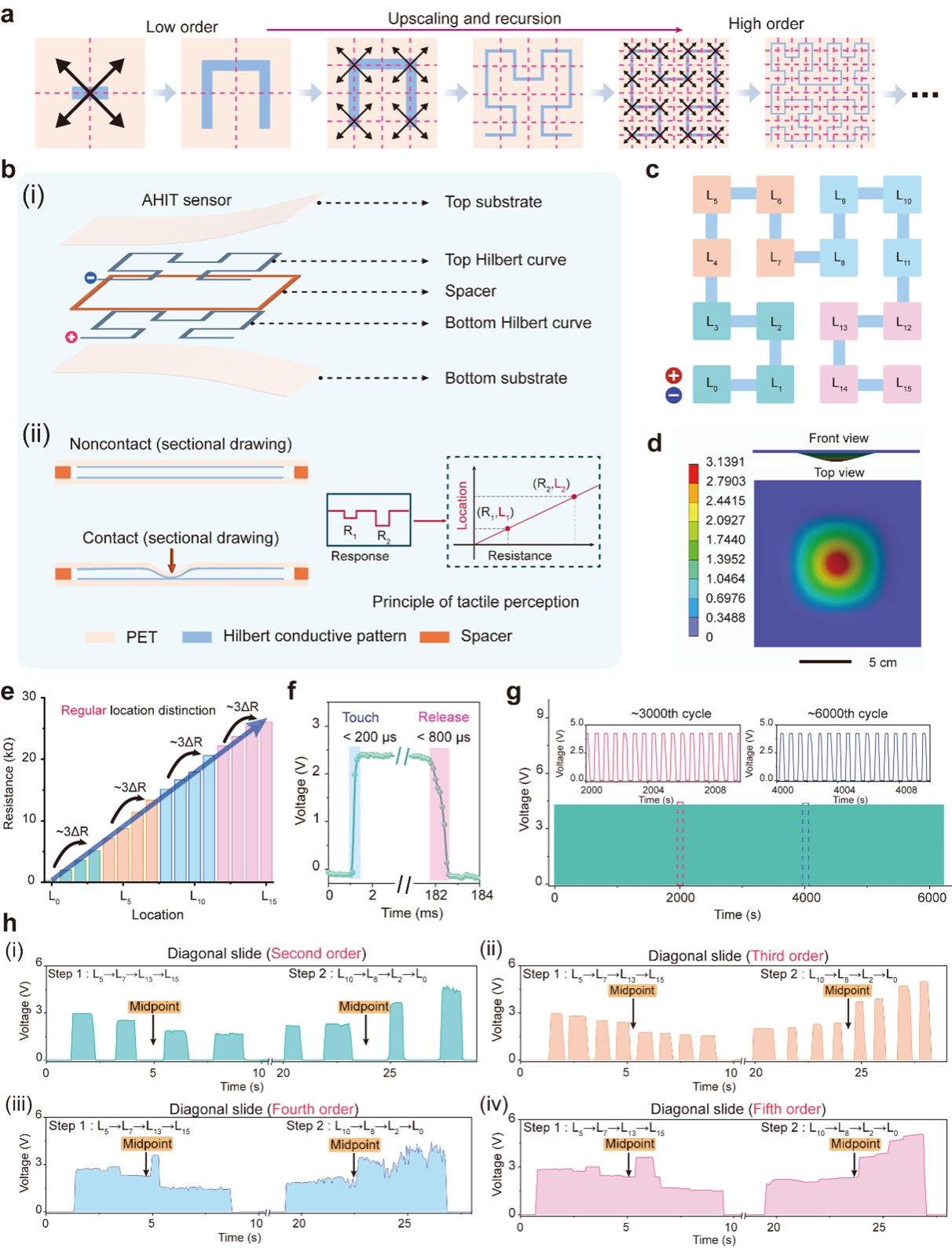
图2 逆设计触觉传感器中的几何分形原理概述
2.3 逆设计触觉传感器的验证与应用示例
(1) 人机交叉
面对人机界面的应用需求,逆设计触觉传感器能够根据需要进行有效的逆向设计。作为概念验证,团队将逆设计触觉传感器被用于实现多功能触摸交互。在此过程中,根据应用终端的要求分形递归不同阶次的希尔伯特曲线导电路径。然后利用这些导电路径制造不同阶次的逆设计触觉传感器。最后,组装定制的转换电路,并根据具体的逆设计触觉设计传感器进行相应的信号指令编程,从而实现对相应应用终端的控制。
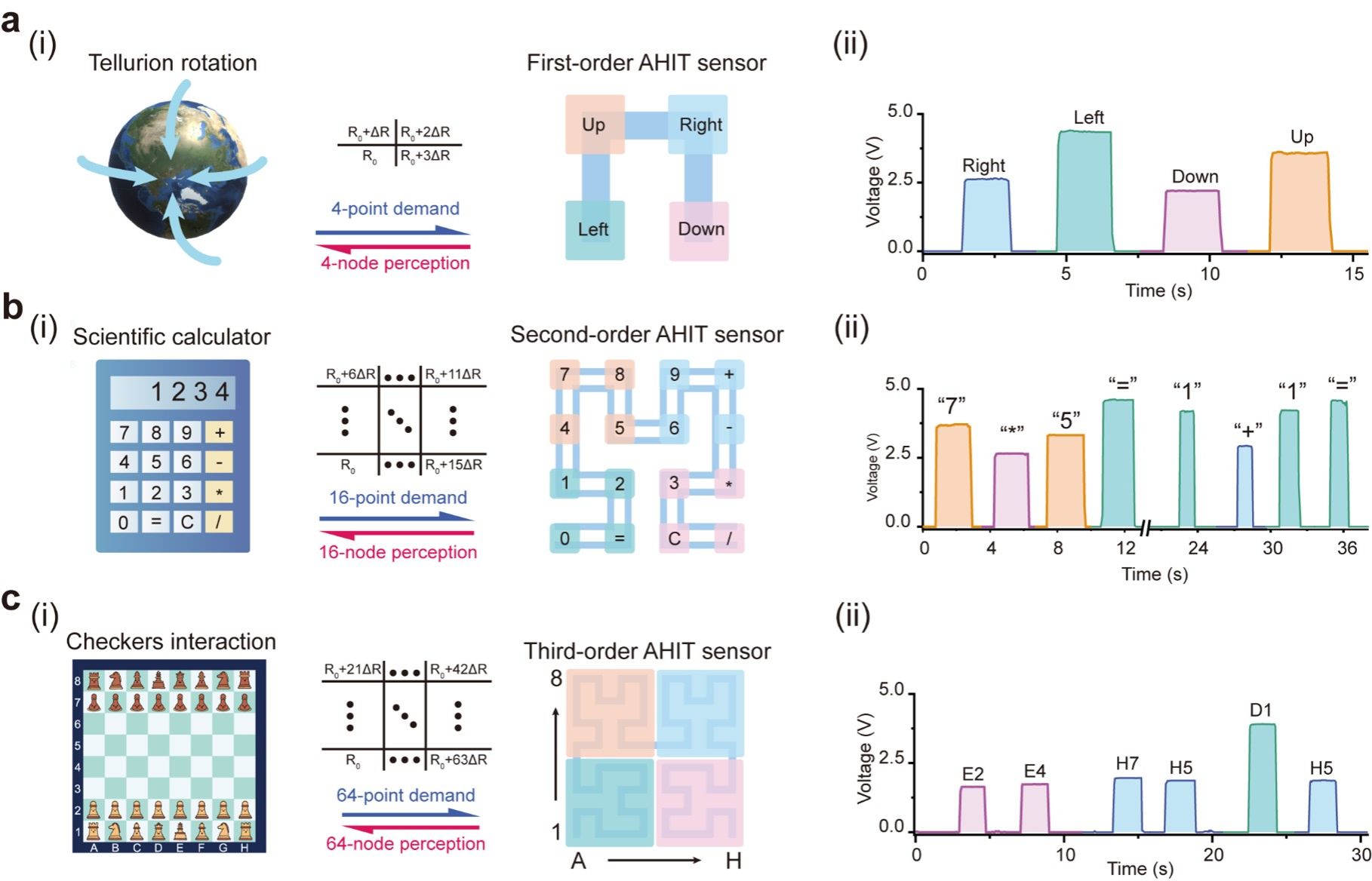
图3. 不同阶逆设计触觉传感器在人机交互中的应用
(2) 隐私保护
隐私安全始终是人们关注的热点问题。传统的硬件加密方法虽然直接有效,但因密钥被盗用而降低保护效果。此外,通过密码矩阵设置用户密码的方式也容易受到视觉捕捉的威胁,导致密码泄露。在这种背景下,提出将软件与硬件结合进行加密作为一种新的替代策略。这种方式不仅能增加密码的复杂性,还能增强安全性。具体而言,可以利用分形递归生成的逆设计触觉传感器作为硬件密钥,而用户在特定位置的触摸序列作为软件密钥。这种双重加密方法不仅扩展了密码组合可能性,提高了隐私保护的安全性和灵活性,还实现了分级管理,进一步增强了系统的整体安全性。

图4. 逆设计触觉传感器通过自身信息存储实现的多维加密
(3) 便捷图像传输
将图像作为信息载体是一种简单直观的策略,有效传递意图。不过,传输包含冗余信息的图像会消耗大量存储空间,在互联网大数据时代,这种消耗愈发不可承受。为了解决这一问题,发送端将包含冗余信息的图像压缩成特定代码,接收端则将其解压缩回图像。逆设计触觉传感器可以设计成转换器,用户在其上绘制图像时,同时生成一维信号作为代码。具体而言,用户可以在传感器上绘制图案或符号表达意图,这些滑动轨迹产生的信号将被转化为代码并传输到接收终端。在接收端,这些代码再被解耦为实际的图像,从而便于信息的快速传输与处理。这一机制不仅简化了信息交流过程,还显著减少了数据传输的存储需求,提高了传输效率和准确性。
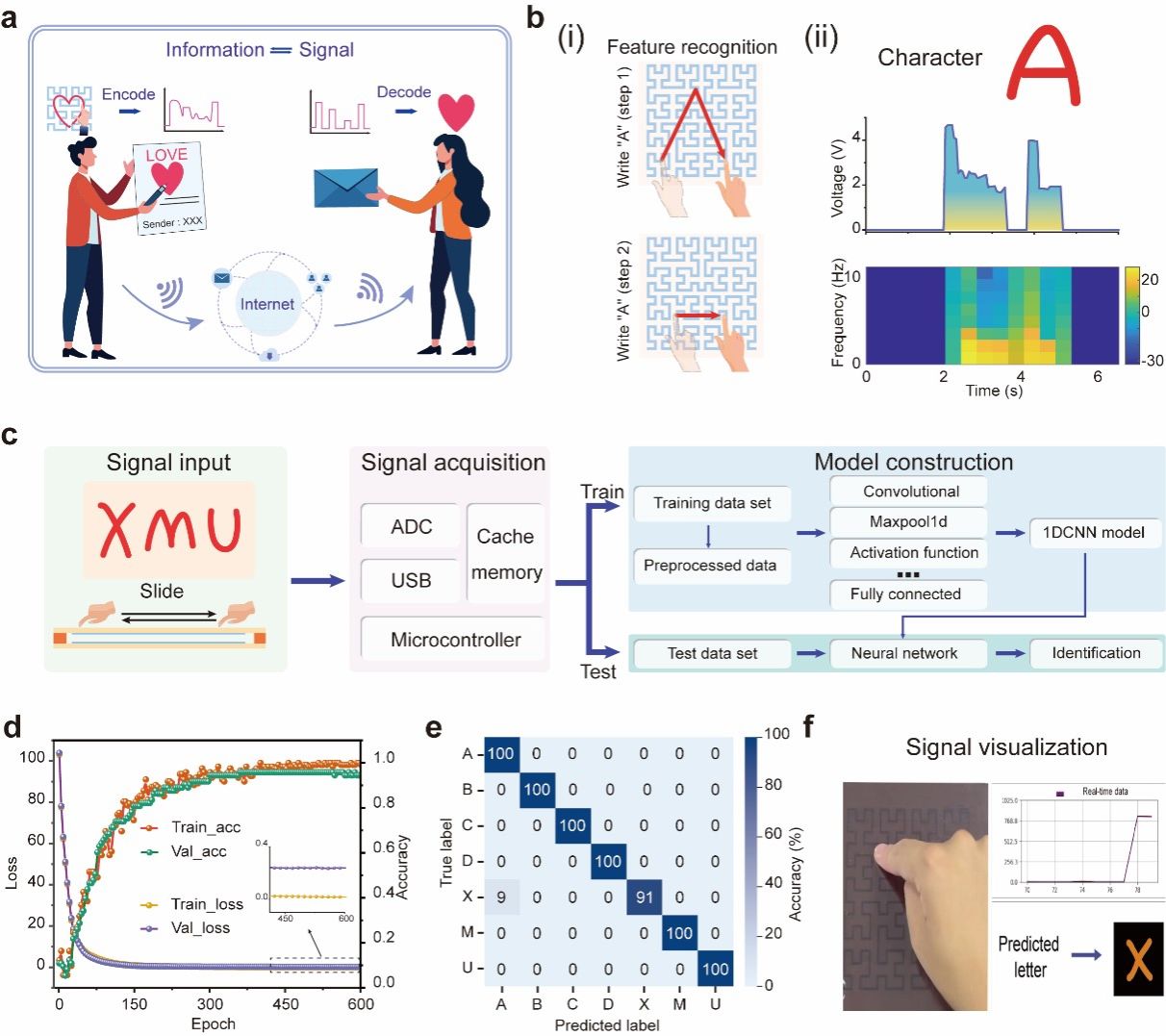
图5. 基于机器学习的图形识别系统
3、总结
将几何分形与硬件设计深度融合,创新提出一种结构即功能的智能感知单元,并建立适用于触觉传感器的适应性逆向设计范式。该范式通过双层分离结构与希尔伯特曲线结合,以一维信号实现平面全域触觉感知。利用希尔伯特曲线的分形递归特性,在单平面上生成密集位置节点,随节点间距增大,响应电阻呈梯度变化,使传感器通过哈希编码实现自信息存储。作为验证,该传感器可定制应用于多功能人机界面、多维加密及意图传输。该技术有望为机器人、可穿戴设备和元宇宙接口提供高效智能的感知系统,推动人机融合迈向新高度。
论文的研究工作得到了国家自然科学基金面上项目(52275575)、福建省杰出青年基金项目(2024J010011)、福建省科技计划项目(2024H0002)、深圳市科技计划项目(JSGG20220831094600002)等项目的资助和支持。
